기술이전 상세 정보를 불러오는 중입니다...
기술이전 상세 정보를 불러오는 중입니다...
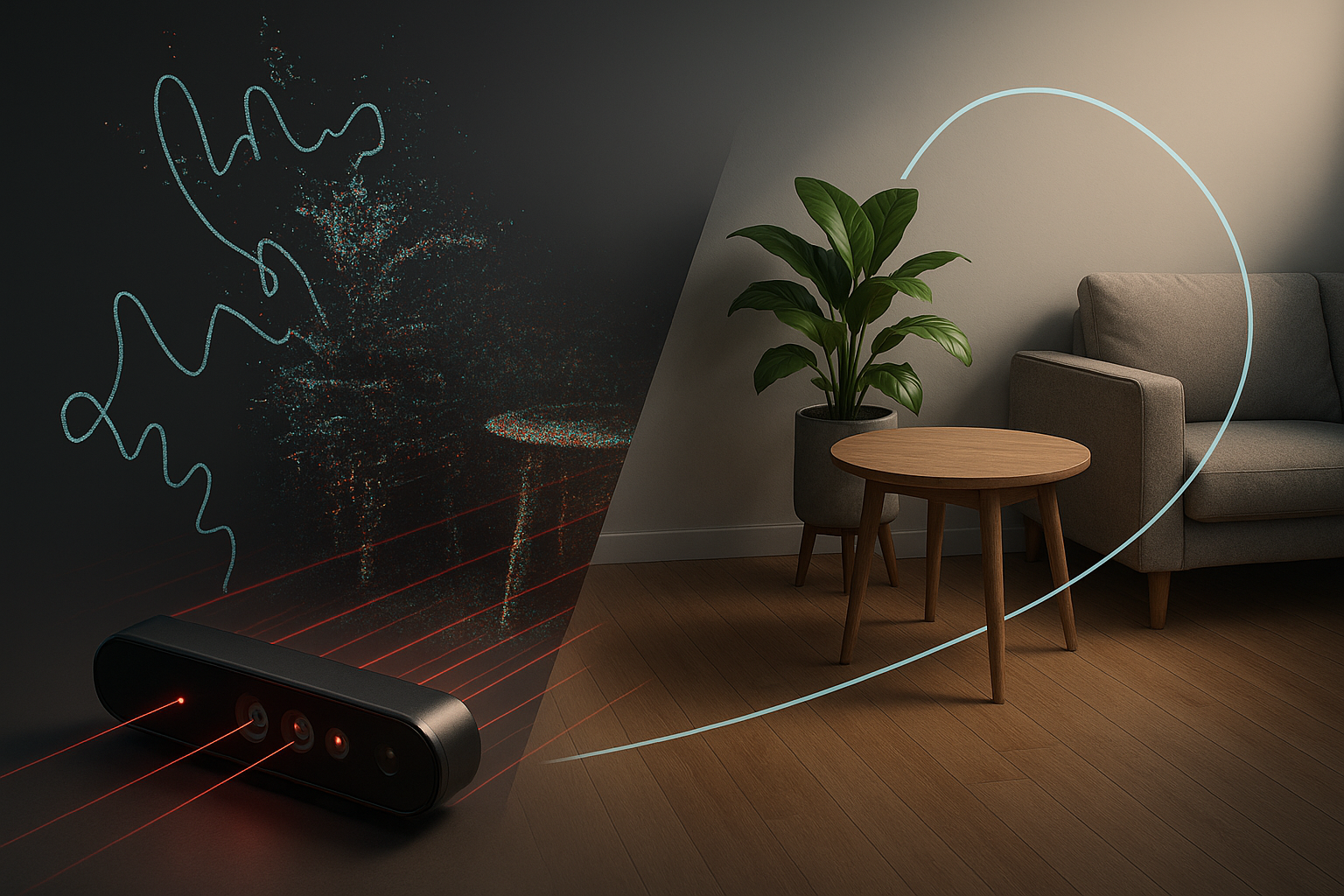
저가형 RGB-D 카메라의 고질적인 문제인 노이즈와 카메라 궤적 추정 오차는 3D 공간 인식을 저해하는 요인입니다. 본 발명은 이러한 문제를 해결하기 위해 두 가지 혁신적인 방법을 제시합니다. 첫째, 인접 프레임 간 기하변환을 활용한 깊이 맵 보정으로 노이즈를 효과적으로 제거합니다. 둘째, 다중-레벨 예측자-수정자 방법을 통해 카메라 궤적 추정 시 발생하는 오차 누적 속도를 획기적으로 감소시킵니다. 이 기술은 적은 연산량과 메모리로 높은 정확도를 장시간 유지하며, 모바일 환경 및 3D 물체 복원 분야에 큰 이점을 제공합니다.
| - |
| 출원번호 | 등록번호 |
| 1020170022963 | 1019563120000 |
| 권리구분 | 출원일 |
| 특허 | 2017.02.21 |
| 중요 키워드 | |
저가형 카메라포인트 클라우드SLAM자율주행 센서기하변환함수모바일 로봇예측자-수정자 방법깊이 맵 보정RGB-D 카메라오차 감소 기술ICP 기법3D 공간 인식실시간 위치 추적Visual Odometry카메라 궤적 추정영상기기데이터처리 |
기술이전 상담신청
연구자 미팅
기술이전 유형결정
계약서 작성 및 검토
계약 및 기술료 입금

보유 기술 로딩 중...
인기 게시물 로딩 중...